yy漫画画免费读漫画下拉式 小米机器人仿生手大升级:类似人手大小,拥有全掌触觉、仿生汗腺
米官方于本年3月初发布消息称,在汽车工厂的自攻螺母上件工站里,小米机器人达成了3小时不间断作业的成果,其双侧同时安装的成功率为90.2%,并且契合了产线76秒一拍的节奏要求。此消息来自IT之家 ,发布于3月27日。
小米官方今日宣布,为进一步提升作业能力妖精漫画免费登录入口界面下拉式,对 Xiaomi CyberOne 的仿生手做设计改造,将其体积压缩了 60%,使其完全与工人手部尺寸一致,增加了 64%的自由度,全掌触觉传感器覆盖面积增加到 8200 平方毫米,实现了 15 万次以上的抓握操作循环寿命,还增加了仿生汗腺设计以提升主动散热能力。

小米官方宣称,期望凭借这些优化举措,得以塑造出一款能够稳定地运用于工厂作业的仿生手,进而把作业成功率提高到近乎 100%。

在促使作业成功率进一步得以提升这个进程里,小米碰到了两个问题,其一,是期望在出现视觉遮挡这种状况的时候,自己能够拥有更多的触觉感知,凭借增多的触觉感知达到更好的掌内操作效果,然而,却很难寻觅到那种可以提供全掌触觉的仿生手解决方案;其二,是触觉数据的获取,在很大程度上依赖低效的遥操作方式。
当下,触觉手套乃是小米在研发进程里一个较为出色的方案,其一,它能够更为出色地达成涵盖指尖、指腹以及掌心的全掌触觉;其二,人能够通过穿戴触觉手套来直接收集操作数据,高效地架构大批量操作数据集;另外,手套这种方式能够减轻磨损失效问题,维护起来更为便利了。
当人手进行同样操作时,当仿生手(遥操作)穿戴触觉手套进行同样操作时,二者获得了近似的触觉数据。

为更好复用靠人手采集的数据,机器人仿生手要尽可能按和人手 1:1 的比例去设计,使其具备近似的构型。而且在可达空间方面,要像人手那样,在驱动能力方面也要像人手那样,在惯量分布方面同样要像人手那样,在操控响应等方面也要尽量与人手对标,以此减少仿真和真机间的差异,减少同构问题所带来的影响。
在那种于工厂作业之际能达成90%以上成功率的仿生手上面,小米实施了大幅度的设计优化,将其体积压缩了大约60%(从228mm * 105mm * 64mm压缩到了187mm * 88mm * 36mm),还增加了50%的自由度以及83%的主动自由度。

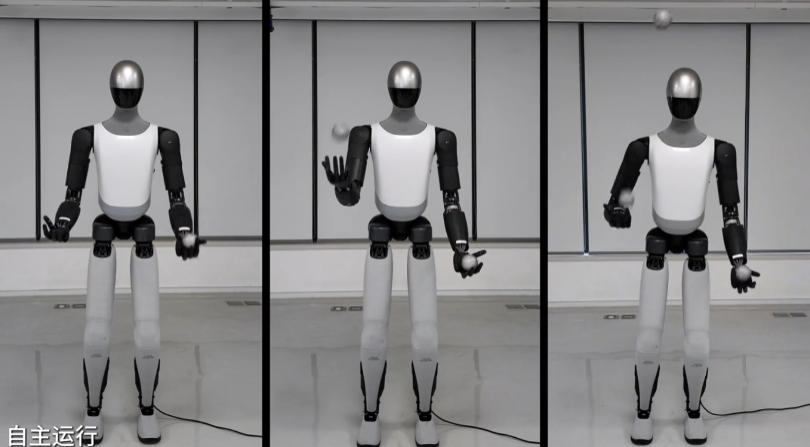
左边是三小时持续作业版本,中间是一名身高一米七十三的男性人手,右边是优化版本,其不戴触觉手套或者戴着触觉手套。
在尺寸受限,达不到人手大小时限制条件规范处,要试图再去提高机器人仿生手自由度,使其达到人手所拥有具备的水平,也就是22 - 27自由度这般,小米所碰到遭遇的最大难题是硬件可靠性,以及散热方面的问题。
在实际运用当中,就算是一些并不复杂的操作,仿生手往往在少于1万次的反复作业进程里出现损坏状况,像下方图片呈现出来的腱绳、弹簧以及套管等等发生失效的问题有损坏产生。
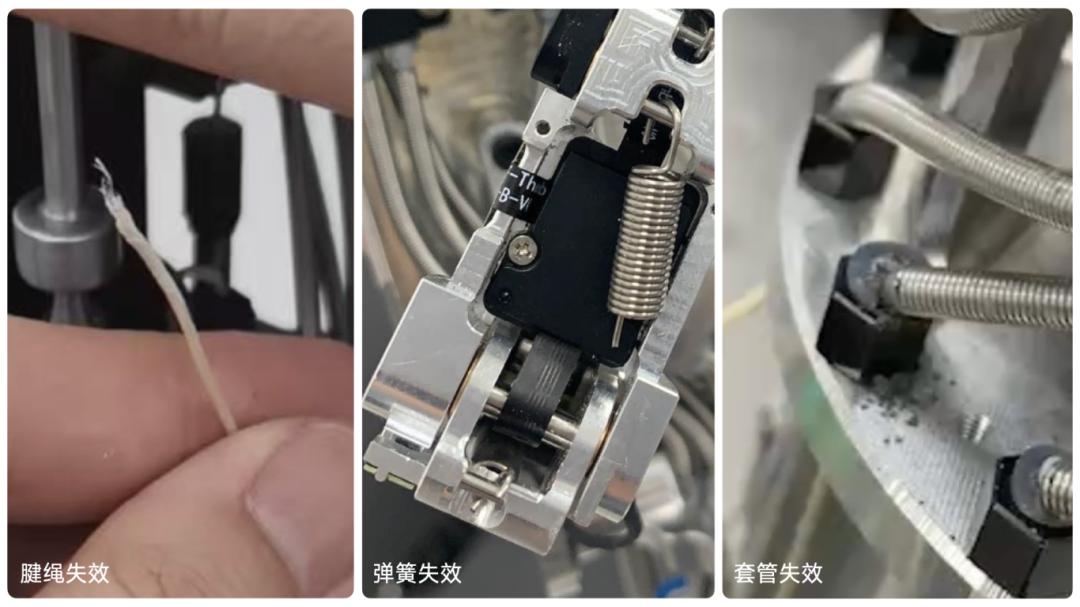
手部零部件失效问题
为了处理这些问题,小米经由设计,仿真,测试,持续地进行迭代,依照实际操作场景,提高内部每一丝一毫部件的耐久性,进而遂渐提升仿生手的整体可靠性。
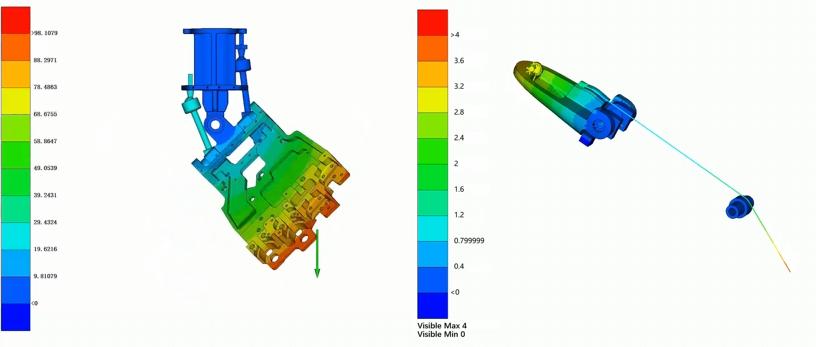
可靠性仿真优化
经历了往昔一年的持续迭代,小米已然使仿生手于实际抓握这般的反复操作当中汗汗画画免费阅读在线阅读下拉式,达成了超过十五万次的循环寿命以及稳定的触觉数据获取。

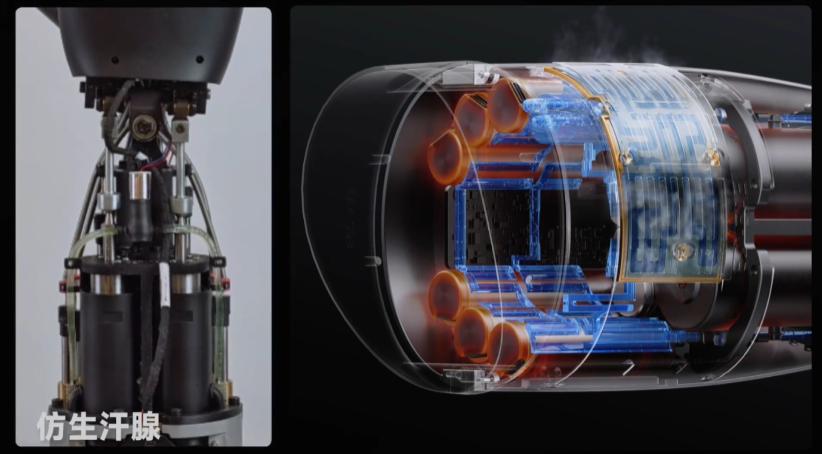
更多的电机对于更高的主动自由度来说是必需的妖精漫画在线看漫画页面下拉式,当所有电机被集成于一个狭小空间内时,局部过热问题就会出现。在实际的重载应用当中,单手电机塔的功率有可能超过100瓦,在综合效率为70%的情况下,超过30瓦的功率会被转化成热量。特别是在高热损的堵转工况状态下,怎样高效散热,直接决定了连续高负载作业的时长。
于常规被动散热之外,小米试着模拟高效的人类汗腺这般方式开展主动散热,室温状况下,1mL水蒸发能够带走2000焦以上的热量,在紧凑的小臂结构当中,利用金属3D打印制作液冷循环通道,借助微泵把电机热量转移至蒸发区,凭借蒸发吸热迅速降温。
在实际进行的测试当中,仿生汗腺系统每分钟能够蒸发 0.5mL 的水,并且可以提供大约 10 瓦的主动散热能力。
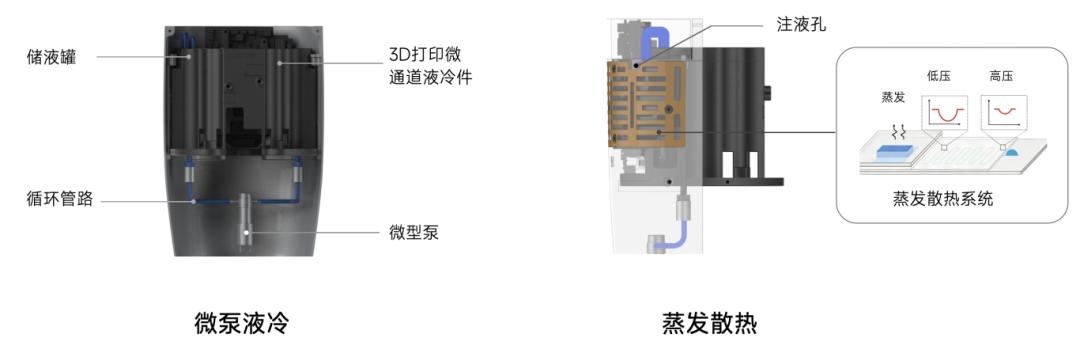
示意图和原理
小米期望,仿生手在进行作业之时的动作进程,也能够和人手保持一样或者相类似,于抓握之际,能够展现出类似于人的柔顺特性以及包覆特性,而且还具备和人手相同的可达空间,以及相近的执行速度与负载能力。
历经人手抓握数据的采集,于仿真环境里,小米图谋融合触觉信息,运用模仿以及强化学习策略,针对大量数字零件展开学习与训练,直至生成趋近拟人的抓握姿态。
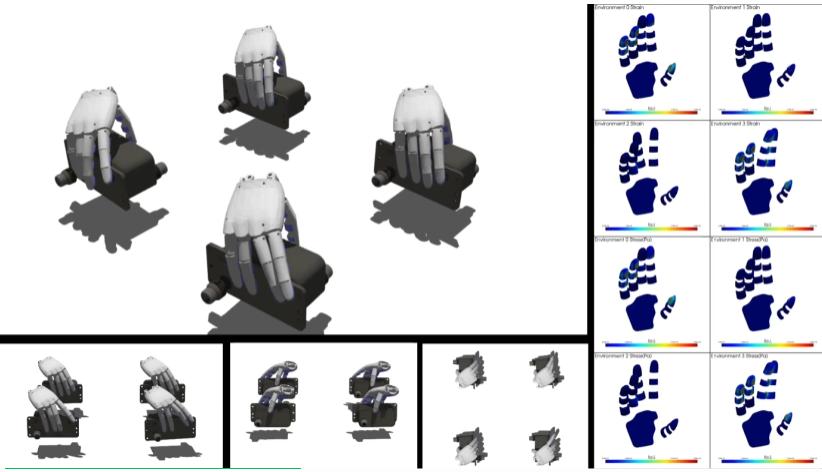
抓握过程的全掌触觉仿真
建立于上述全部研发根基上面,Xiaomi在实验室里头着手去试验更多依靠精细触觉的操作技能。

 鲁ICP备18019461号-4
鲁ICP备18019461号-4
我要评论